



Die heutigen mobilen Scansysteme sind schnell, skalierbar und in der Lage, qualitativ hochwertige Punktwolken zu erstellen, die auch für die anspruchsvollsten Projekte genau genug sind.
ANMERKUNG DES REDAKTIONSVORSITZENDEN: Die folgenden Informationen stammen aus einem kürzlichen NavVis Webinar über das Erreichen einer hohen Genauigkeit mit mobilen Scannern. Weitere Informationen zu den folgenden Themen finden Sie in der Aufzeichnung des Webinars, die Sie hier abrufen können.
Es ist allgemein bekannt, dass mobile Scanner Ihren Erfassungsworkflow beschleunigen und Ihr Unternehmen voranbringen können. Was Sie vielleicht nicht wissen, ist, dass die besten Systeme von heute auch extrem genaue Punktwolken erzeugen können, die genau genug für die anspruchsvollsten Dokumentationsprojekte sind.
Wir zeigen Ihnen wie. Hier ein kurzer Überblick, wie Sie mit einem mobilen Scanner eine Genauigkeit von 6 mm (oder besser) erreichen können.
Bewährte Praktiken beim mobilen Scannen
Da diese Geräte Punktwolken erfassen, während Sie sich bewegen, sind sie anfällig für kleine Fehler, die die Qualität Ihrer Punktwolke beeinträchtigen können. Glücklicherweise bieten die heutigen mobilen Scanner Funktionen, mit denen Sie diese Fehler korrigieren und die höchstmögliche Genauigkeit gewährleisten können.
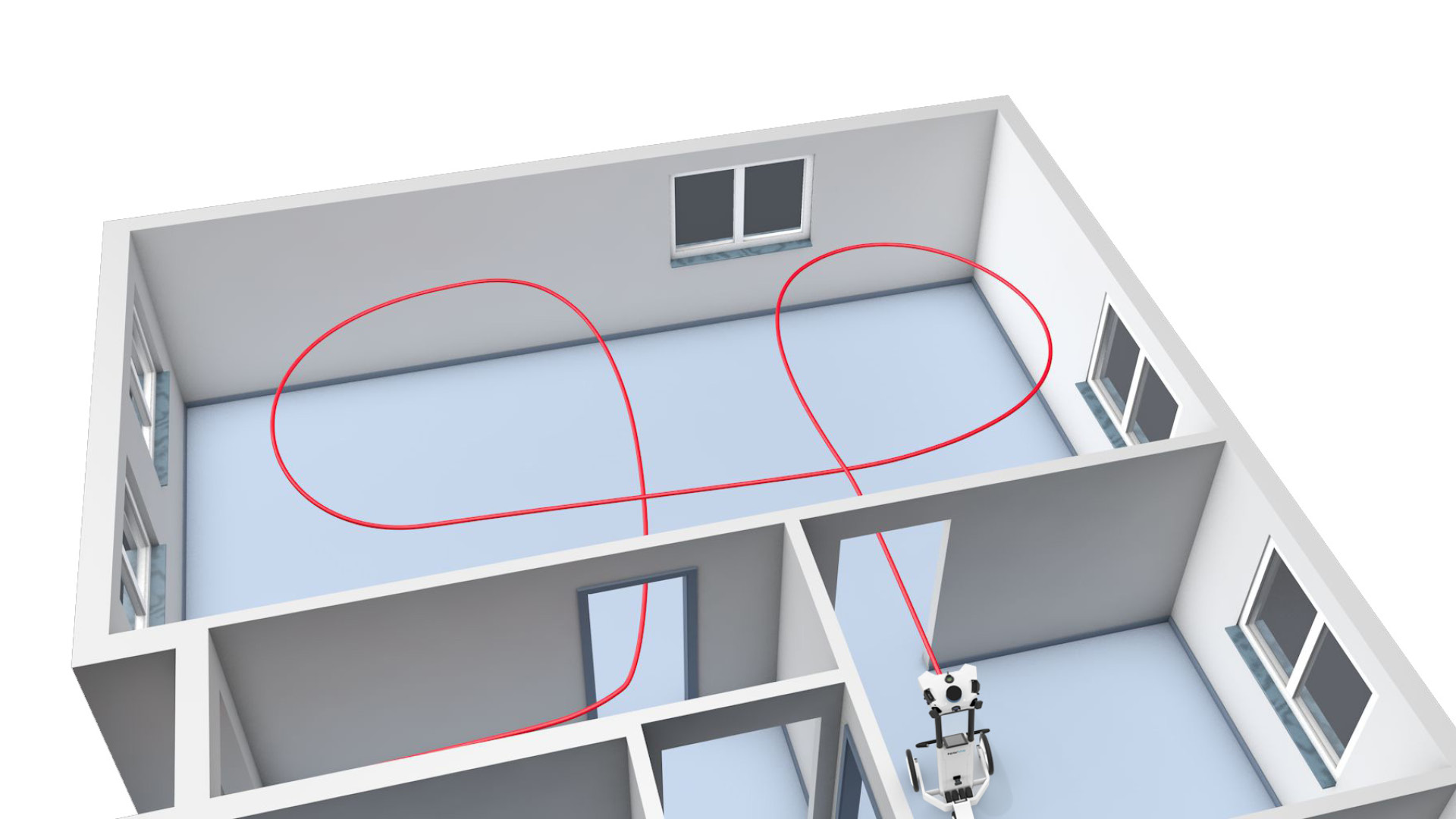
Loop Closure
Diese Funktion ist bei praktisch allen Systemen standardmäßig vorhanden und reicht oft für kleinere Scans aus.
Um Loop Closure zu verwenden, kehren Sie zu einer Stelle zurück, die Sie bereits gescannt haben. Der AlgorithmusSLAM (Simultane Lokalisierung und Kartierung) erkennt diese Stelle und optimiert die Punktwolke automatisch, um Fehler zu korrigieren und die Genauigkeit zu verbessern.
Kontrollpunkt Optimierung
Nur wenige der moderneren mobilen Scanner auf dem Markt bieten diese Funktion.
Kontrollpunkt Die Optimierung ist für viele Scans optional, da Sie bei kleineren Projekten mit gutem Loop Closure eine hohe Genauigkeit erreichen können. Sie ist jedoch unerlässlich, wenn Sie größere Objekte scannen, da sie den Drift Fehler korrigiert, den längere Scans in Ihrer Punktwolke verursachen.
Die Anbieter implementieren diese Funktion auf unterschiedliche Weise. Um die Kontrollpunkt Optimierung mit einem NavVis Scanner zu verwenden, fügen Sie Vermessungsziele über Ihre Anlage hinzu und erfassen ihre Koordinaten mit einer Totalstation. Erfassen Sie beim Scannen die Passpunkte mit dem Scanner. Wenn Sie die Daten nachbearbeiten, geben Sie die gemessenen Koordinaten für jeden Kontrollpunkt ein, und die Software nutzt diese Informationen, um Ihre Punktwolke zu optimieren und ihre Genauigkeit zu verbessern.
Beweise aus der Praxis
Lassen Sie uns nun demonstrieren, welche Genauigkeitsgewinne Sie durch die Optimierung von Loop Closure und Kontrollpunkt erwarten können. Dazu werden wir uns zwei Feldtests ansehen, die NavVis mit seinem mobilen NavVis VLX tragbaren mobilen Scanner durchgeführt wurden.
Kleiner Scan mit Loop Closure
Für den ersten Test hat ein NavVis Team einen Abschnitt eines gewöhnlichen Bürogebäudes gescannt.
Sie wählten die Umgebung aus, weil sie eine Kombination aus Räumen und Fluren enthielt, von der sie wussten, dass sie eine Herausforderung für einen mobilen Scanner darstellt. (Mit anderen Worten, es war wahrscheinlich, dass Fehler auftreten würden, die korrigiert werden mussten.) Da der Scan klein war, verwendete das Team Loop Closure - aber keine Kontrollpunkte - um die Punktwolke zu optimieren und Fehler zu vermeiden.
- Fläche: 460 Quadratmeter
- Zeit zum Scannen: 30 Minuten
- Kontrollpunkte: 0
Für Referenzdatensatz, NavVis wurde eine vollständige Vermessung des Büros in Auftrag gegeben. Das Team maß die Entfernungen auf der Vermessung manuell und verglich sie mit denselben Entfernungen in der mobilen Punktwolke.
Die Ergebnisse? Die Loop Closure hat sich bei der Korrektur von Fehlern in diesem kleinen Scan als wirksam erwiesen.
- 22 von 24 lokalen Messungen lagen innerhalb von 5 mm vom gemessenen Wert Referenzdatensatz
- Die übrigen 2 lokalen Messungen lagen innerhalb von 6 und 10 mm
Großer Scan mit Kontrollpunkten
Für den nächsten Test hat das NavVis Team ein Parkhaus gescannt.
Da die Anlage recht groß war, wusste man, dass die endgültige Punktwolke sehr wahrscheinlich Drift aufweisen würde. Um diesen Fehler zu korrigieren, verwendeten sie eine Kombination aus Loop Closure und Kontrollpunkt .
- Fläche: 1500 Quadratmeter (groß)
- Zeit bis zum Scannen: 20 Minuten
- Kontrollpunkte: 8
Das Team optimierte die Daten auf zwei Arten: einmal nur mit Loop Closure und einmal mit Loop Closure und Passpunkten. Zum Schluss verglichen sie beide Datensätze mit einem terrestrischen Scan, den sie bei einem lokalen Dienstleister in Auftrag gegeben hatten.
Die Ergebnisse? Kontrollpunkt Optimierung erwies sich als sehr effektiv bei der Reduzierung Drift.
- Loop Closure: 8 mm absolute Genauigkeit
- Loop Closure und Kontrollpunkt Optimierung: 6 mm absolute Genauigkeit
Fazit
Anhand der obigen Daten wird deutlich, dass die Optimierung von Loop Closure und Kontrollpunkt Ihnen helfen kann, sehr genaue Punktwolken zu erstellen.
Noch nicht überzeugt? Dieser Beitrag ist nur ein kurzer Überblick über die Tests, die NavVis durchgeführt hat, um die Wirksamkeit der Fehlerkorrektur zu überprüfen und die Genauigkeit der mobilen Scanner in einer Vielzahl von schwierigen Umgebungen zu messen. Weitere Informationen zu den Tests - und einen tieferen Einblick in die harten Zahlen - finden Sie hier in einer On-Demand-Aufzeichnung des Webinars.