




Der endgültige Leitfaden für SLAM & mobiles Mapping
INHALTSVERZEICHNIS
Was ist SLAM?
Wie funktioniert das, und was bedeutet das für die mobile 3D-Kartierung?
SLAM 101
Simultane Lokalisierung und Kartierung (SLAM) ist keine spezifische Softwareanwendung oder gar ein einzelner Algorithmus. SLAM ist ein weit gefasster Begriff für ein technologisches Verfahren, das in den 1980er Jahren entwickelt wurde und es Robotern ermöglichte, sich autonom und ohne Karte durch neue Umgebungen zu bewegen.
Die autonome Navigation erfordert die Lokalisierung der Maschine in der Umgebung und die gleichzeitige Erstellung einer Karte dieser Umgebung. Das ist sehr schwierig zu bewerkstelligen, denn die Maschine braucht eine Karte der Umgebung, um ihren eigenen Standort zu bestimmen. Aber um die Karte zu erstellen, muss sie ihren eigenen Standort kennen.
Aufgrund dieses unendlichen Kreislaufs von Abhängigkeiten wurde SLAM manchmal als "Huhn oder Ei"-Problem bezeichnet.
Wie funktioniert SLAM ?
Es gibt viele Ansätze für SLAM. Glücklicherweise können wir dennoch einige Verallgemeinerungen vornehmen, um die Grundidee zu verdeutlichen.
Hier ist eine sehr vereinfachte Erklärung: Beim Starten des Roboters fusioniert die SLAM Technologie die Daten von den eingebauten Sensoren des Roboters und verarbeitet sie dann mithilfe von Computer-Vision-Algorithmen, um Merkmale in der Umgebung zu "erkennen". So kann SLAM eine grobe Karte erstellen und eine erste Schätzung der Position des Roboters vornehmen.
Wenn sich der Roboter bewegt, nimmt SLAM diese ursprüngliche Positionsschätzung, sammelt neue Daten von den eingebauten Sensoren des Systems und erstellt eine neue (und verbesserte) Positionsschätzung. Sobald diese neue Positionsschätzung bekannt ist, wird die Karte wiederum aktualisiert, womit der Zyklus abgeschlossen ist.
Durch kontinuierliche Wiederholung dieser Schritte verfolgt SLAM den Weg des Roboters, während er sich durch die Anlage bewegt. Gleichzeitig wird eine detaillierte Karte erstellt.
Die Entwicklung der SLAM
Aufgrund der rasanten Zunahme der Rechenleistung seit den 1980er Jahren - ganz zu schweigen von der Verfügbarkeit von frei herunterladbarem Code von Unternehmen wie Google - wird SLAM heute in einer Vielzahl von Anwendungen eingesetzt. Tatsächlich findet man sie in praktisch jeder Anwendung, in der eine Maschine eine Live-3D-Karte ihrer Umgebung benötigt, um zu funktionieren.
Hier sind nur einige Anwendungen, die auf der SLAM Technologie basieren:
- Autonome Verbraucherrobotik (wie Drohnen oder Staubsauger)
- Selbstfahrende Autos
- Augmented-Reality-Anwendungen für Smartphones
- Mobile 3D-Kartierungssysteme
SLAM und mobiles Mapping
Jetzt können wir über die für uns wichtigste Anwendung von SLAM sprechen: mobiles Mapping Systeme. Sie können sich diese Werkzeuge als Laserscanner vorstellen, die für die bestmöglichen Arbeitsabläufe bei der Gebäudedokumentation entwickelt wurden.
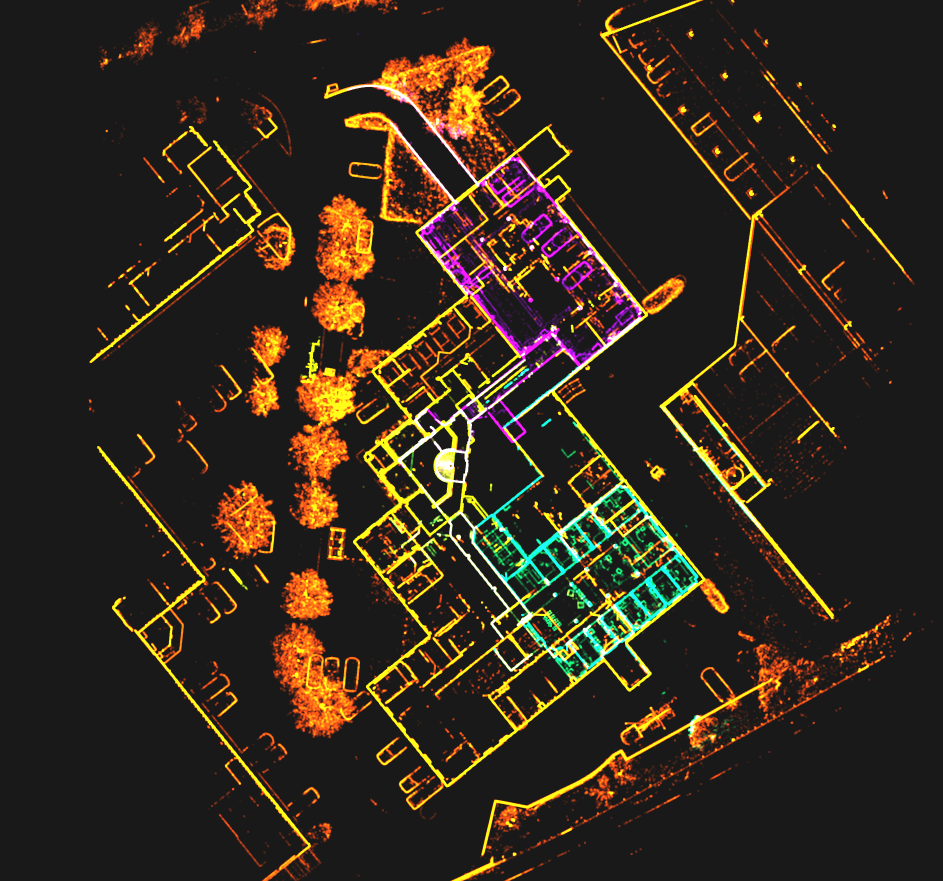
mobiles Mapping Systeme verwenden eine Kombination aus hochkalibrierten Sensoren und der für die Kartierung optimierten SLAM Technologie. Mit diesen Tools können Sie 3D-Punktwolken und Panoramabilder im Gehen erfassen. Sie bieten eine schnelle, umfassende Dokumentation für große Anlagen und komplexe Umgebungen wie Fabriken, Baustellen und Büros.
Sie können diese Geräte auch als:
- Systeme für Innenräume mobiles Mapping (IMMS)
- Begehbare Systeme mobiles Mapping
- SLAM Laserscanner
Aber im Grunde sind sie alle dasselbe.
Diese Geräte sind jedoch nicht zu verwechseln mit einer anderen Art von mobiles Mapping System, das für große Außenaufnahmen auf einem Fahrzeug montiert wird.
.jpg?width=300&name=Screenshot%202020-09-08%20at%2009.57.24%20(1).jpg)
Was macht SLAM in mobiles Mapping?
SLAM ist die "geheime Soße", die es dem System ermöglicht, ohne Stativ zu arbeiten.
Die SLAM Technologie fusioniert Daten von den Sensoren an Bord des mobiles Mapping Systems, um Ihren Standort zu verfolgen, während Sie durch das Objekt gehen. Sie können sich jede Position auf dieser Trajektorie als "virtuelles Stativ" vorstellen, das die Software während der Verarbeitungsphase verwendet, um sicherzustellen, dass sich jeder Punkt in der Punktwolke an der richtigen Stelle befindet.

Warum Sie das interessieren sollte
Durch die Ermöglichung der Entwicklung der mobiles Mapping Technologie hat SLAM uns geholfen, den nächsten logischen Schritt bei der Entwicklung von Dokumentationstechnologie zu machen.
Lange Zeit wurde die Baudokumentation manuell durchgeführt, mit Geräten wie Theodoliten oder Maßbändern. In den 1980er Jahren kamen die ersten Totalstationen auf, die Punkte viel schneller und mit extrem hoher Präzision erfassen. In den 2000er Jahren kamen terrestrische Laserscanner (TLS) auf und brachten den Dokumentations-Workflow auf die nächste Stufe, indem sie Millionen von Punkten statt nur eines Punktes auf einmal erfassten.
Im Jahr 2015 erschienen die ersten mobiles Mapping Systeme, die SLAM verwenden. Sie boten einen weiteren Schritt nach vorn - sie können Millionen von Punkten erfassen, während sich der Bediener bewegt, so dass er nicht mehr an eine bestimmte Position gebunden ist, wie es bei TLS der Fall ist. Ein großer Vorteil ist, dass sie auch RGB-Kameras enthalten, die ohne zusätzlichen Aufwand 360°-Fotos aufnehmen können.
RAPID CAPTURE
Ein TLS-Workflow kann es erforderlich machen, den Scanner für ein einziges Projekt Dutzende Male einzurichten (vielleicht Hunderte Male, wenn das Asset besonders groß ist). mobiles Mapping macht diesen Schritt überflüssig und beschleunigt den Workflow erheblich. Bei typischen Projekten haben wir eine Geschwindigkeitssteigerung um das 10-fache oder mehr festgestellt.
SCHNELLERE REGISTRIERUNG
Da ein TLS nur einen kleinen Bereich auf einmal erfasst, müssen Sie die Scans miteinander verbinden, um eine endgültige Punktwolke zu erstellen. Dies kann durch Überlappung der Scans erreicht werden, was jedoch zu einer Verlangsamung führt, da die Entfernung, die das TLS zur nächsten Station zurücklegen kann, begrenzt ist. Oder Sie können Vermessungsziele verwenden, was komplex ist und den Zeitaufwand vor Ort erhöht.
Ein mobiles Gerät scannt kontinuierlich - in manchen Fällen bis zu 3.000 Quadratmeter - bevor Sie einen weiteren Scanvorgang starten müssen. Das bedeutet weniger Arbeit, um eine vollständige Abdeckung zu gewährleisten.
UMFANGREICHE DATEN
Da jeder Laserscanner nur das erfassen kann, was sich in seiner Sichtlinie befindet, müssen Sie bei einem TLS das Gerät in eine neue Position bringen, wenn Sie an einem Hindernis vorbei scannen und leere Stellen in Ihren Daten vermeiden wollen. Mit einem mobilen Gerät können Sie um ein Hindernis herumgehen, Ihre Erfassung ausfüllen und sich auf den Weg machen.
INTUITIVE, FOTOREALISTISCHE DOKUMENTATION
Die besten mobilen Kartographen verwenden eine Kombination aus Lidar und RGB-Kameras, um einen dicht gefärbten, fotorealistischen 3D-Datensatz des Gebäudes zu erfassen. Diese Begehungen sind intuitiv zu navigieren, zu erkunden und zu messen, selbst für Beteiligte, die mit Punktwolken überhaupt nicht vertraut sind.
ECHTZEIT-FEEDBACK
Führende mobile Kartierer mit einem Tablet-Display zeigen Ihnen während der Arbeit die Qualität Ihrer Erfassung an und geben Ihnen Echtzeit-Feedback zu Ihrem Scan. Haben Sie eine Stelle übersehen? Der Bildschirm zeigt es Ihnen an, sodass Sie sofort eine Korrektur vornehmen können.
mobiles Mapping im Vergleich zum terrestrischen Laserscanning
Vergleich von Arbeitsabläufen und deren Übereinstimmung mit Ihren Projektanforderungen
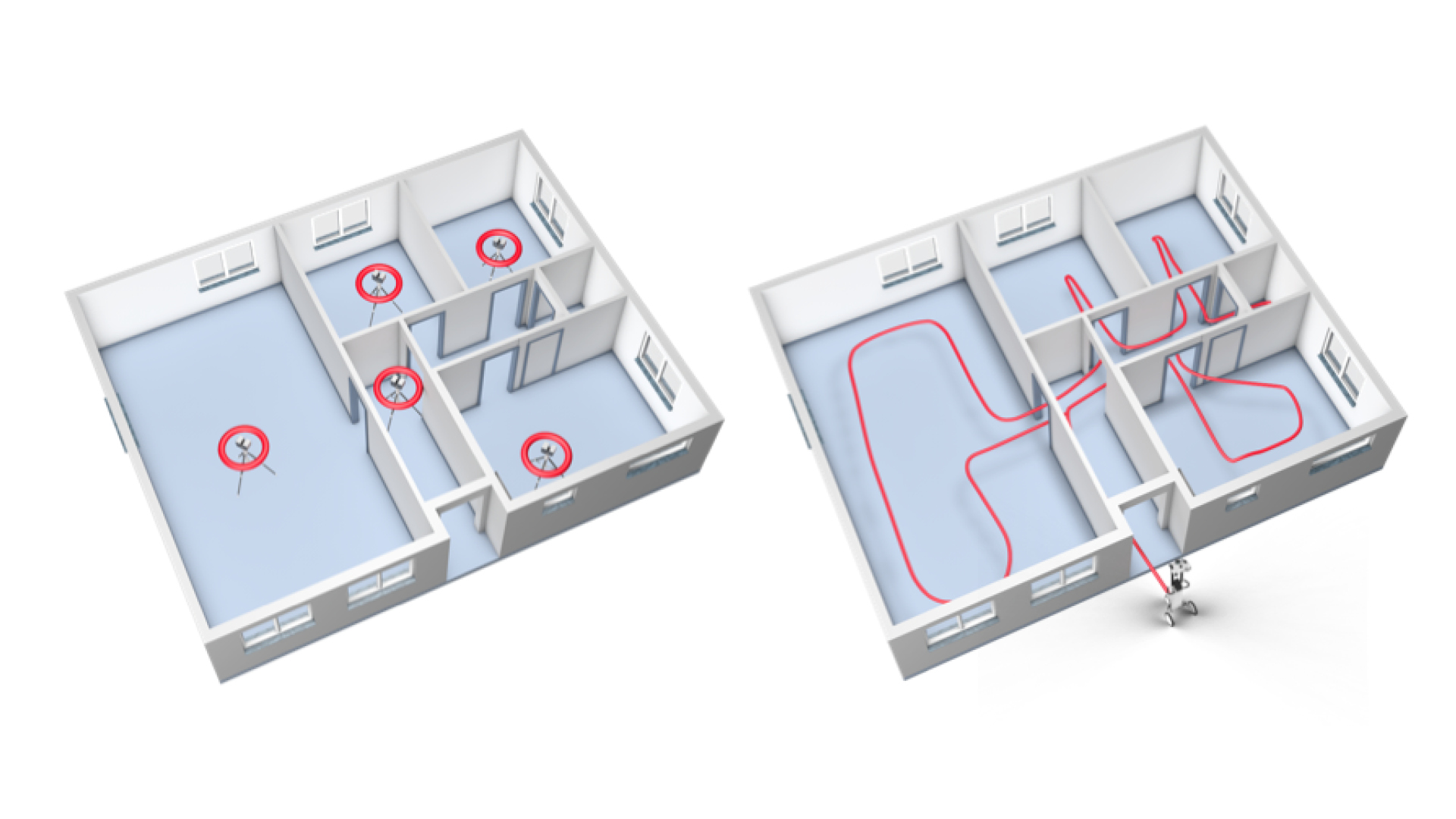
Um die Vorteile der Systeme SLAM und mobiles Mapping zu verdeutlichen, sehen wir uns an, wie sie im Vergleich zu einem TLS bei der Dokumentation einer typischen Büroumgebung abschneiden.
Unten sehen Sie eine Illustration der Aufstellungen, die Sie benötigen, um diesen komplexen Raum mit TLS und zielbasierter Registrierung zu erfassen. Fügen Sie zusätzliche Aufstellungen in jedem der Türrahmen für die cloud-to-cloud Registrierung hinzu (es sei denn, Sie möchten die Zeit für die Einrichtung von Zielen aufwenden). Fügen Sie zusätzliche Aufstellungen hinzu, wenn Möbel die Sicht des Scanners behindern, und noch mehr Aufstellungen, wenn Sie die feinen Details von Merkmalen wie Fensterrahmen erfassen möchten.
Mit einem TLS könnte man diesen Bereich in etwa 20 Minuten scannen, aber angesichts der oben genannten zusätzlichen Faktoren ist klar, dass es wahrscheinlich länger dauern würde.
Mit dem Workflow von mobiles Mapping können Sie auf das Stativ verzichten und einfach nach Bedarf durch den Raum gehen, um zu fotografieren. Man kann sich schnell bewegen und sicher sein, dass man alles erwischt hat, was man braucht.
Was es für Ihr Unternehmen tun kann
Durch die Ermöglichung schneller, flexibler Arbeitsabläufe, die wir oben beschrieben haben, können die Systeme SLAM und mobiles Mapping weitreichende Auswirkungen auf Ihr Unternehmen haben. Wenn Sie Ihr Toolset um einen Mobile Mapper erweitern, können Sie Ihre bestehenden Kunden halten und neue Kunden gewinnen, was Ihrem Unternehmen zu Wachstum verhilft.
EFFIZIENZ VERBESSERN
Schließen Sie größere Projekte zu geringeren Kosten ab und übernehmen Sie mehr Projekte mit Ihrem vorhandenen Personal.
DIE STÖRUNG DES KUNDEN ZU REDUZIEREN
Schneller rein und raus. Verringern Sie die Ausfallzeiten für Ihren Scan und gewinnen Sie neue Kunden in sensiblen Branchen wie dem Gesundheitswesen, der Fertigung und anderen.
DIENSTLEISTUNGEN UND ANGEBOTE ERWEITERN
Bieten Sie 360°-Rundgänge an, die mit Ihrem mobilen Scanner erstellt werden. Machen Sie Ihr Leistungsangebot attraktiver als das Ihrer Mitbewerber.
MEHR FLEXIBILITÄT
Erfüllen Sie die Anforderungen preissensibler Kunden, indem Sie hochwertige Datensätze zu niedrigen Kosten produzieren.
WETTBEWERBSVORTEILE AUSBAUEN
Indem Sie Ihre Effizienz, Ihre Flexibilität und Ihre Dienstleistungen verbessern und die Unterbrechungen für Ihre Kunden reduzieren, heben Sie Ihr Unternehmen von der Konkurrenz ab.
Kostenloses Whitepaper
Finden Sie heraus, wie genau NavVis VLX im Vergleich zu statischen Scannern ist
Häufig gestellte Fragen
Jetzt, wo Sie die Grundlagen von SLAM und mobiles Mapping kennen, haben Sie wahrscheinlich einige tiefer gehende technische Fragen. Im Folgenden beantworten wir die häufigsten Fragen - schauen Sie in Zukunft wieder vorbei, denn wir werden diesen Abschnitt mit weiteren Antworten aktualisieren.
Welche Fachbegriffe muss ich kennen, um mobiles Mapping zu verstehen?
Wir haben ein kurzes Glossar zusammengestellt, das Sie hier lesen können und in dem alle Fachbegriffe in einfachem Englisch erklärt werden.
Wie genau ist ein mobiles Mapping System?
Die Antwort ist einfach: Die besten Systeme liefern zuverlässig Daten, die für die Bedürfnisse von Bestandsdokumentation mehr als geeignet sind. In einem Fallstudie haben wir unser eigenes System getestet NavVis VLX indem wir einen einzigen Scan in einem Parkhaus durchführten. Mit der Anwendung von Loop Closure zur Fehlerkorrektur validierte das Team die Daten mit einer absoluten Genauigkeit von 8 mm, auf ein Sigma genau. Mit der Loop Closure UND Kontrollpunktoptimierung verbesserte sich die absolute Genauigkeit auf 6 mm.
Das bedeutet, dass Sie die Daten getrost für Projekte wie LOD 300 BIMs oder Grundrisse mit einem Maßstab von bis zu 1:50 verwenden können.
Die kompliziertere Antwort: Die absolute Genauigkeit eines mobilen Kartierers lässt sich nur sehr schwer mit einer einzigen Zahl definieren. Das liegt daran, dass die endgültige Punktwolke mit der Technologie von SLAM verarbeitet wird - und die Leistung von SLAM hängt von zahlreichen realen Faktoren ab, z. B. von der Geometrie der Umgebung, die Sie scannen. (Aus diesem Grund werden die absoluten Genauigkeitsangaben in den technischen Datenblättern oft als Spanne angegeben, z. B. 6-15 mm.)
Bevor ein Anbieter verallgemeinernde Aussagen über die Genauigkeit eines bestimmten mobilen Kartierers machen kann, muss er umfangreiche Tests in einer Vielzahl von Szenarien durchführen, um zu sehen, wie das System in jedem der realen Szenarien funktioniert, in denen es eingesetzt werden würde.
Warum funktionieren manche SLAM Systeme besser als andere?
Wenn man drei Systeme mit identischen Formfaktoren und Sensornutzlasten aneinanderreiht, kann man immer noch erwarten, dass die Systeme Ergebnisse liefern, die sich in ihrer Qualität erheblich unterscheiden. Warum ist das so?
Es kommt auf die Qualität der Implementierung von SLAM an. Hier sind zwei der wichtigsten Faktoren, die ein SLAM System von einem anderen unterscheiden.
ROBUSTNESS
In der realen Welt werden SLAM Systeme manche Umgebungen als schwieriger empfinden als andere. Hier ist ein gutes Beispiel: In einem langen Flur mit wenigen Türen fehlen die Merkmale, die SLAM benötigt, um Ihre Position zu verfolgen. Dies kann zu Fehlern in den von SLAM generierten Trajektorendaten führen und die Genauigkeit der endgültigen Punktwolke beeinträchtigen.
Eine robustere SLAM kann mit mehr solcher Situationen umgehen und sie besser bewältigen. Sie erzeugen eine bessere Flugbahn und damit genauere Punktwolken.
FEHLERKORREKTUR
Die Umgebung ist nicht das Einzige, was in einem mobilen Datensatz Fehler verursachen kann. Fehler kommen auch von den Sensoren selbst - alle Sensoren produzieren eine gewisse Menge an Rauschen, die sich zu winzigen Abweichungen in der SLAM Schätzung summieren können. Mit der Zeit summiert sich das zu einem Problem namens Drift.
Deshalb bietet praktisch jeder Scanner auf dem Markt Funktionen, die Fehler korrigieren und die Genauigkeit des endgültigen Datensatzes verbessern.
Allerdings sind nicht alle SLAM Systeme in dieser Hinsicht gleich. Die meisten bieten Loop Closure an, das Fehler korrigiert, wenn Sie zu einer Stelle zurückkehren, die Sie bereits gescannt haben. Aber nicht alle Loop Closure Technologien liefern die gleichen Ergebnisse. Und einige Systeme bieten eine Kontrollpunktfunktion, mit der die Trajektoriendaten an vermessene Kontrollpunkte gebunden werden können, die meisten jedoch nicht.
Kurz gesagt, einige Systeme von SLAM sind so konzipiert, dass sie die Komplexität des Scannens in der realen Welt besser bewältigen als andere. Dieser Unterschied zeigt sich deutlich in den Ergebnissen.

Warum verarbeiten manche SLAM Systeme Daten schneller als andere?
Es kommt auf die Rechenleistung an.
Wie bereits erwähnt, fusioniert ein SLAM Kartierungssystem Daten von einer Vielzahl von Sensoren, um eine Punktwolke zu erstellen. Die Liste umfasst IMUs, die die Ausrichtung des Geräts verfolgen, HD-Kameras, die große, kolorierte Bilder aufnehmen, und mehrere Lidar-Einheiten, die 300.000 Punkte (oder mehr) pro Sekunde aufzeichnen.
Die Herausforderung besteht darin, dass die Sensornutzlast eine riesige Datenmenge erzeugt - zu viel für den Computer in einem mobilen Gerät, um sie problemlos zu verarbeiten.
Folglich muss jeder Hersteller seine Prioritäten bei der Datenverarbeitung setzen. Einige entwickeln ihre Geräte so, dass sie Punktwolken in Echtzeit erzeugen und dabei Kompromisse bei der Qualität eingehen. Andere entscheiden sich für eine langsamere Verarbeitung der Daten, liefern dafür aber qualitativ hochwertigere Ergebnisse. Eine andere Gruppe bietet Ihnen die Möglichkeit, je nach den Anforderungen Ihres Projekts die Echtzeitverarbeitung oder die Verarbeitung in höherer Qualität zu wählen.
NavVis hat einen anderen Ansatz gewählt. Die Kartographen des Unternehmens verarbeiten die Daten, während Sie scannen, und zeigen auf Ihrem Tablet visuelles Feedback in Echtzeit an. Anschließend verwenden sie im Büro leistungsfähigere Computer, um die Daten zu finalisieren und Punktwolken von höchster Qualität zu erstellen.
Wie kann das System SLAM eine genauere Punktwolke erzeugen, als für den Sensor angegeben ist?
Denn ein mobiler Scanner erfasst kontinuierlich, während Sie gehen.
Während ein terrestrischer Scanner jeden Messpunkt nur einmal während eines Scans erfasst, nimmt ein SLAM System jede Messung automatisch mehrere Male und aus mehreren Winkeln auf, während Sie sich durch das Objekt bewegen.
Dadurch erhält die Software Nachbearbeitung einen großen Satz möglicher x-, y- und z-Werte für jeden Punkt. Sie führt eine komplexe Analyse dieser Werte durch und kann so Unsicherheiten, die durch physikalische Phänomene wie z. B. den Sensor Rauschen entstehen, reduzieren oder sogar eliminieren.
Das Ergebnis? Es kann eine Punktwolke erzeugen, die genauer ist, als für den Sensor angegeben.
mobiles Mapping Die Technologie ändert sich schnell. Woher weiß ich, dass mein Gerät nicht sofort nach dem Kauf veraltet sein wird?
Ein Gerät von SLAM besteht nicht nur aus der Hardware, sondern ist in hohem Maße von der Software abhängig, mit der die endgültige Punktwolke erstellt wird. Durch Aktualisierungen und Optimierungen dieser Software kann ein Hersteller Ihr Gerät noch lange nach dem Kauf aktualisieren.
Einige Anbieter entwickeln ihre Software ständig weiter, um die Verarbeitung von SLAM , die Live-Visualisierung und die Qualität ihrer Nachbearbeitung zu verbessern. Sie geben diese Verbesserungen als Software-Updates heraus, so dass Sie sie einfach herunterladen und auf Ihrem Gerät oder Computer installieren können. Voila: Sie sind nun auf dem neuesten Stand der Technik.

Warum verarbeiten manche SLAM Systeme Daten schneller als andere?
Es kommt auf die Rechenleistung an.
Wie bereits erwähnt, fusioniert ein SLAM Kartierungssystem Daten von einer Vielzahl von Sensoren, um eine Punktwolke zu erstellen. Die Liste umfasst IMUs, die die Ausrichtung des Geräts verfolgen, HD-Kameras, die große, kolorierte Bilder aufnehmen, und mehrere Lidar-Einheiten, die 300.000 Punkte (oder mehr) pro Sekunde aufzeichnen.
Die Herausforderung besteht darin, dass die Sensornutzlast eine riesige Datenmenge erzeugt - zu viel für den Computer in einem mobilen Gerät, um sie problemlos zu verarbeiten.
Folglich muss jeder Hersteller seine Prioritäten bei der Datenverarbeitung setzen. Einige entwickeln ihre Geräte so, dass sie Punktwolken in Echtzeit erzeugen und dabei Kompromisse bei der Qualität eingehen. Andere entscheiden sich für eine langsamere Verarbeitung der Daten, liefern dafür aber qualitativ hochwertigere Ergebnisse. Eine andere Gruppe bietet Ihnen die Möglichkeit, je nach den Anforderungen Ihres Projekts die Echtzeitverarbeitung oder die Verarbeitung in höherer Qualität zu wählen.
NavVis hat einen anderen Ansatz gewählt. Die Kartographen des Unternehmens verarbeiten die Daten, während Sie scannen, und zeigen auf Ihrem Tablet visuelles Feedback in Echtzeit an. Anschließend verwenden sie im Büro leistungsfähigere Computer, um die Daten zu finalisieren und Punktwolken von höchster Qualität zu erstellen.
Wie kann das System SLAM eine genauere Punktwolke erzeugen, als für den Sensor angegeben ist?
Denn ein mobiler Scanner erfasst kontinuierlich, während Sie gehen.
Während ein terrestrischer Scanner jeden Messpunkt nur einmal während eines Scans erfasst, nimmt ein SLAM System jede Messung automatisch mehrere Male und aus mehreren Winkeln auf, während Sie sich durch das Objekt bewegen.
Dadurch erhält die Software Nachbearbeitung einen großen Satz möglicher x-, y- und z-Werte für jeden Punkt. Sie führt eine komplexe Analyse dieser Werte durch und kann so Unsicherheiten, die durch physikalische Phänomene wie z. B. den Sensor Rauschen entstehen, reduzieren oder sogar eliminieren.
Das Ergebnis? Es kann eine Punktwolke erzeugen, die genauer ist, als für den Sensor angegeben.
mobiles Mapping Die Technologie ändert sich schnell. Woher weiß ich, dass mein Gerät nicht sofort nach dem Kauf veraltet sein wird?
Ein Gerät von SLAM besteht nicht nur aus der Hardware, sondern ist in hohem Maße von der Software abhängig, mit der die endgültige Punktwolke erstellt wird. Durch Aktualisierungen und Optimierungen dieser Software kann ein Hersteller Ihr Gerät noch lange nach dem Kauf aktualisieren.
Einige Anbieter entwickeln ihre Software ständig weiter, um die Verarbeitung von SLAM , die Live-Visualisierung und die Qualität ihrer Nachbearbeitung zu verbessern. Sie geben diese Verbesserungen als Software-Updates heraus, so dass Sie sie einfach herunterladen und auf Ihrem Gerät oder Computer installieren können. Voila: Sie sind nun auf dem neuesten Stand der Technik.

Überzeugen Sie sich selbst
Mobiles Mapping war noch nie so aufregend
Die Geschwindigkeit und Skalierbarkeit der Geräte von mobiles Mapping ist so hoch wie nie zuvor, und die Genauigkeit von vermessungstauglich ermöglicht auch die anspruchsvollsten Projekte. Legen Sie selbst Hand an mit NavVis VLX oder NavVis M6 und sehen Sie selbst, was möglich ist.
