



Les fiches de spécification sont compliquées. Pour dissiper toute confusion, nous allons passer en revue neuf termes courants que tous les professionnels du site numérisation laser devraient connaître.
Si vous êtes à la recherche d'un système cartographie mobile , vous avez probablement passé plus d'une heure ou deux à consulter les fiches techniques. Au cours de ce processus, vous êtes probablement tombé sur une ou deux spécifications déroutantes. "Vous vous demandez peut-être ce qu'est une classe laser. "...Et pourquoi devrais-je m'en préoccuper ?"
Aujourd'hui, notre objectif est d'éclaircir le mystère des spécifications des lidars en vous présentant certains termes de la . NavVis VLX fiche technique. Nous expliquerons les spécifications les plus obscures, ce qu'elles signifient et pourquoi elles sont importantes (ou non) pour votre travail.
Avant de commencer, notez que d'autres fabricants peuvent utiliser une terminologie légèrement différente de la nôtre. NavVis utilise. Mais les idées que vous apprendrez ici devraient vous aider à naviguer dans leurs fiches techniques.
Allons-y.
Couches
(Parfois appelés : canaux). Le nombre de lasers utilisés par le scanner pour capturer une image nuage de points. NavVis VLX utilise deux lidars capteurs, chacun avec 16 couches, pour un total de 32 couches.
Pourquoi est-ce important ?
Plus le scanner utilise de lasers, plus il peut capturer une scène rapidement. Et plus il est possible de le déplacer rapidement tout en conservant une haute résolution.
Les unités conçues pour des applications plus rapides, comme la cartographie depuis le toit d'une voiture en mouvement, utilisent le lidar capteurs avec plus de couches. Cela leur permet de capturer plus de points dans un laps de temps donné et de garantir une résolution suffisamment élevée pour l'utilisation prévue. Les scanners utilisés pour des applications plus lentes, comme la cartographie d'intérieur, peuvent atteindre la même résolution avec (relativement) moins de couches.
Points par seconde
Le nombre de mesures que le scanner peut capturer en une seconde.
Pourquoi est-ce important ?
Un plus grand nombre de points par seconde indique que le scanner capturera des nuages de points plus denses, toutes choses étant égales par ailleurs. Mais n'oubliez pas qu'un plus grand nombre de points par seconde n'est pas toujours meilleur. Une fois que vous avez suffisamment de points dans le nuage pour l'application envisagée, la capture d'un plus grand nombre de points rend votre site nuage de points plus volumineux et plus lourd à traiter.
Laser class
Indique le degré de dangerosité du faisceau pour l'œil ou la peau. Les lasers peuvent appartenir à l'une des quatre catégories définies dans un document d'orientation de la Food and Drug Administration (FDA) des États-Unis.
Pourquoi est-ce important ?
Offre l’assurance que le scanner peut être utilisé en toute sécurité.
Pratiquement tous les scanners lidar utilisent des lasers de classe 1, la classe la plus sûre. Cela signifie que le scanner est totalement inoffensif, au point que vous (ou un passant) pouvez le regarder directement sans protection oculaire et ne ressentir aucun effet négatif.
Dans la classe 2, le laser commence à irriter l'œil. Dans la classe 3, le fait de regarder le laser sans protection oculaire pendant une période prolongée peut causer des dommages. Les lasers de classe 4 peuvent provoquer un incendie ou brûler les yeux ou la peau. Pensez à un rayon laser de science-fiction.
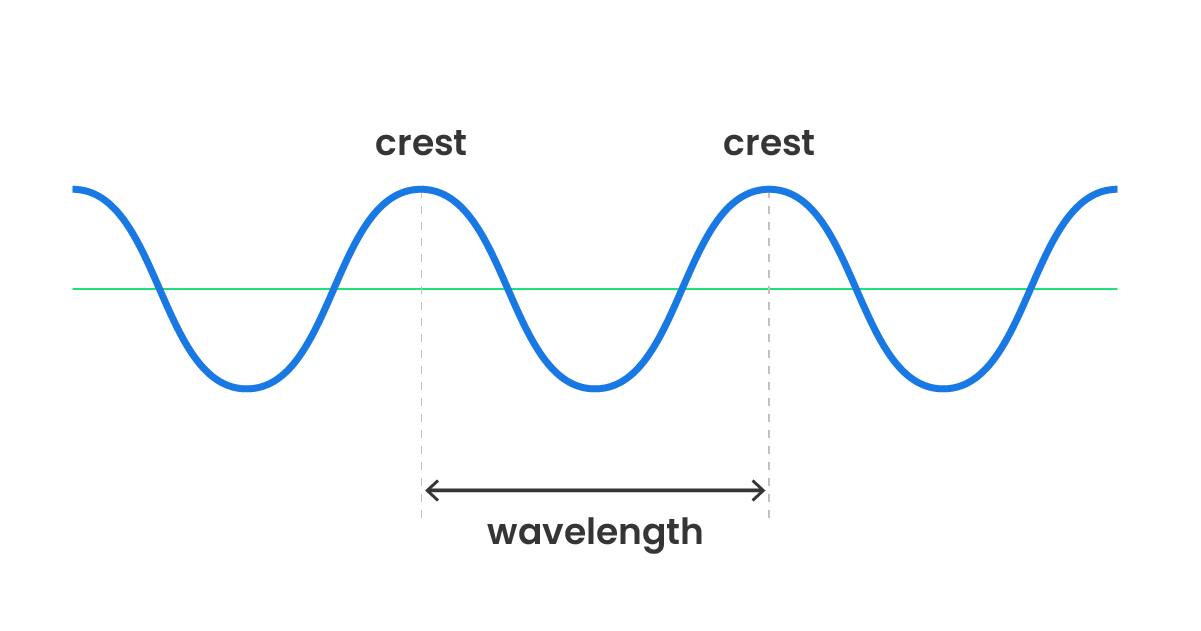
Longueur d’onde
La distance entre les crêtes successives d'une onde dans le faisceau lumineux (voir image). La lumière visible a une longueur d'onde de 400 à 700 nanomètres (nm) et la longueur d'onde détermine la couleur que vous voyez.
Les capteurs Lidar ont tendance à utiliser des longueurs d’onde de ~905 nm ou ~1550 nm, toutes deux invisibles à l’œil humain, sans danger pour la santé selon la FDA, et capables de parcourir des centaines de mètres.
Pourquoi est-ce important ?
Velodyne a publié un excellent article sur blog qui explique l 'importance des longueurs d'onde en termes simples. Mais c'est aussi une plongée plus profonde que ce dont vous pourriez avoir besoin, alors voici l'essentiel.
Le choix du site longueur d'onde a un effet important sur les performances du laser. Un laser de ~1550 nm est plus susceptible d'être absorbé par l'eau présente dans l'environnement, comme le brouillard, la pluie ou même l'humidité de l'air. Pour contrer ce problème, le laser devra utiliser plus de puissance , ce qui signifie une durée de vie plus courte de batterie . Un laser à 905 nm ne perdra pas ses performances dans ces conditions et est beaucoup plus simple à fabriquer.
La portée
La distance maximale (et parfois minimale) à laquelle le laser peut détecter un objet.
Pourquoi cela est-il important ?
En apparence, c'est simple : La portée indique la distance à laquelle votre scanner peut se trouver par rapport à un objet tout en produisant des résultats exploitables.
Mais ne croyez pas que ce chiffre indique la distance qu'un scanner laser peut capturer tout en atteignant les niveaux de précision indiqués sur le site fiche technique. Des tests rigoureux (et l'expérience sur le terrain) montreront que la précision d'un scanner laser diminue au fur et à mesure qu'il s'éloigne de l'objet. (En outre, un grand nombre d'autres facteurs peuvent affecter la précision d'un capteur lidar, même à une distance constante. C'est particulièrement vrai lorsqu'il s'agit de cartographie mobile, qui ajoute un logiciel à l'équation).
Même si la portée est une caractéristique utile, elle ne doit pas être considérée comme une mesure absolue de la distance à laquelle vous pouvez capturer pour votre application particulière. Pour être précis, vous devez effectuer une série de tests rigoureux sur le terrain avec le scanner, en travaillant à différentes portées et dans différents environnements. Cela vous montrerait à quelle distance un scanner peut capturer sur vos chantiers tout en renvoyant des données conformes aux spécifications de qualité dont vous avez besoin.
La bonne nouvelle est que NavVis a déjà effectué ce type de tests pour NavVis VLX. Pour connaître la précision que cet appareil peut atteindre à différentes portées et dans différents environnements, consultez le site NavVis VLX Précision livre blanc.
Classification IP
Il y a un débat - certains disent qu'il s'agit de la protection contre les infiltrations, d'autres parlent de l'indice de protection international. Quoi qu'il en soit, il classifie le niveau de protection qu'un appareil électronique inclut pour empêcher la pénétration de poussières ou de liquides susceptibles d'endommager les circuits internes.
Pourquoi cela est-il important ?
Les appareils électroniques mouillés peuvent poser de gros problèmes (comme vous le savez si vous avez déjà fait tomber votre téléphone dans une flaque d'eau). Le choix d'un scanner doté d'un indice de protection IP adéquat peut vous éviter ce genre de désagrément, car cet indice fournit des indications fiables sur les environnements dans lesquels l'appareil peut être utilisé en toute sécurité.
Un scanner durci conçu pour fonctionner dans des environnements difficiles - comme un chantier de construction actif ou un site extérieur humide - aura souvent un indice de protection IP de 54. Cela signifie qu'il bénéficie d'une certaine protection contre la pénétration de la poussière et qu'il est protégé contre les jets d'eau provenant de toutes les directions. Les scanners dotés de cet indice sont généralement plus chers et limités à une utilisation terrestre.
Le NavVis VLX bénéficie d’un indice IP de 42, ce qui signifie qu’il est protégé contre les objets solides de plus d’un millimètre et qu’il peut résister aux éclaboussures d’eau provenant de toutes les directions.

Précision
Avant d'aborder les termes, une petite remarque : les spécifications de précision d'un scanner mobile sont un peu plus nuancées que celles d'un scanner terrestre. En effet, un scanner terrestre capture des points à partir d'un emplacement fixe dans l'espace, tandis qu'un scanner mobile capture des points pendant que vous vous déplacez, ce qui nécessite un traitement important de la part d'un algorithme ( SLAM ) pour placer les points correctement dans l'espace.
Si l'idée de SLAM est nouvelle pour vous, consultez notre guide complet ici.
Précision relative
La précision d'un site nuage de points à l'échelle locale. Pour un scanner mobile, il s'agit de la précision de la mesure entre des points situés dans un endroit unique, comme une pièce.
Pourquoi est-ce important ?
Ces mesures sont importantes pour déterminer la fiabilité d’un scanner, car elles peuvent montrer la précision des dimensions d’un bâtiment et celle des dimensions d’une pièce, deux éléments importants pour des applications telles que le scan-to-BIM ou la génération de plans d’étage.
Précision absolue
La précision du site nuage de points à l'échelle mondiale. Pour un scanner mobile, il s'agit de la précision de la mesure entre deux points qui n'ont pas été capturés par le scanner en un seul endroit. Par exemple, la distance entre les coins opposés d'un bâtiment.
Pourquoi est-ce important ?
précision globale est cruciale pour déterminer la fiabilité d'un scanner mobile, car elle met en évidence la quantité d'erreurs dérive qui s'accumulent à cause de SLAM dans des projets cartographiques complexes ou de grande envergure. En d'autres termes, elle indique la précision du scanner sur l'ensemble du projet.
Elle est également connue sous le nom de précision absolue, car elle indique la précision des mesures du nuage de points par rapport à leur position "réelle" dans un système de coordonnées absolu déterminé par une méthode d’ordre supérieur, comme le GPS ou la topographie.
Pour des définitions plus précises de ces termes, et pour plus de détails sur la façon dont les scanners sont mesurés, voir . NavVis a mesuré cette mesure pour ses scanners, voir le site NavVis VLX Accuracy livre blanc.

Sean Higgins est un rédacteur indépendant spécialisé dans la technologie, un ancien rédacteur en chef d’une publication spécialisée et un passionné de plein air. Il pense qu’écrire clairement et sans mot à la mode sur les technologies 3D est un service public.