




Le guide définitif de SLAM et de cartographie mobile
TABLE DES MATIÈRES
Qu'est-ce que le SLAM ?
Comment cela fonctionne-t-il et que signifie cela pour la cartographie 3D mobile ?
SLAM 101
La localisation et la cartographie simultanées (SLAM) n'est pas une application logicielle spécifique, ni même un algorithme unique. SLAM est un terme général désignant un processus technologique, développé dans les années 1980, qui permet aux robots de naviguer de manière autonome dans de nouveaux environnements sans carte.
La navigation autonome nécessite de localiser la machine dans l'environnement tout en générant simultanément une carte de cet environnement. C'est très difficile à réaliser, car la machine doit disposer d'une carte de l'environnement pour estimer sa propre position. Mais pour générer la carte, elle doit connaître sa propre position.
En raison de ce cercle de dépendances sans fin, le SLAM a parfois été qualifié de "problème de l'œuf ou de la poule".
Comment fonctionne le SLAM ?
Il existe de nombreuses approches de type SLAM. Heureusement, nous pouvons encore faire quelques généralisations pour démontrer l'idée de base.
Voici une explication très simplifiée : Lorsque le robot démarre, la technologie SLAM fusionne les données provenant du système embarqué de capteurs, puis les traite à l'aide d'algorithmes de vision artificielle pour "reconnaître" les caractéristiques de l'environnement. Cela permet à l'algorithme SLAM de construire une carte approximative et de faire une première estimation de la position du robot.
Lorsque le robot se déplace, le SLAM reprend cette estimation initiale de la position, recueille de nouvelles données à partir du système embarqué de capteurs et établit une nouvelle estimation améliorée de la position. Une fois cette nouvelle estimation de position connue, la carte est mise à jour à son tour, ce qui complète le cycle.
En répétant continuellement ces étapes, le SLAM suit la trajectoire du robot au fur et à mesure qu'il se déplace dans le bien. En même temps, il construit une carte détaillée.
L'évolution du SLAM
En raison de la croissance rapide de la puissance de l'informatique depuis les années 1980 - sans parler de la disponibilité du code librement téléchargeable de sociétés comme Google - le SLAM est désormais utilisé dans une grande variété d'applications. En fait, vous le verrez dans pratiquement toutes les applications où une machine a besoin d'une carte en 3D de son environnement pour fonctionner.
Voici quelques applications qui s'appuient sur la technologie SLAM :
- Robotique autonome grand public (comme les drones ou les aspirateurs)
- Voitures auto-conduites
- Applications de réalité augmentée pour smartphone
- Systèmes mobiles de cartographie 3D
SLAM et cartographie mobile
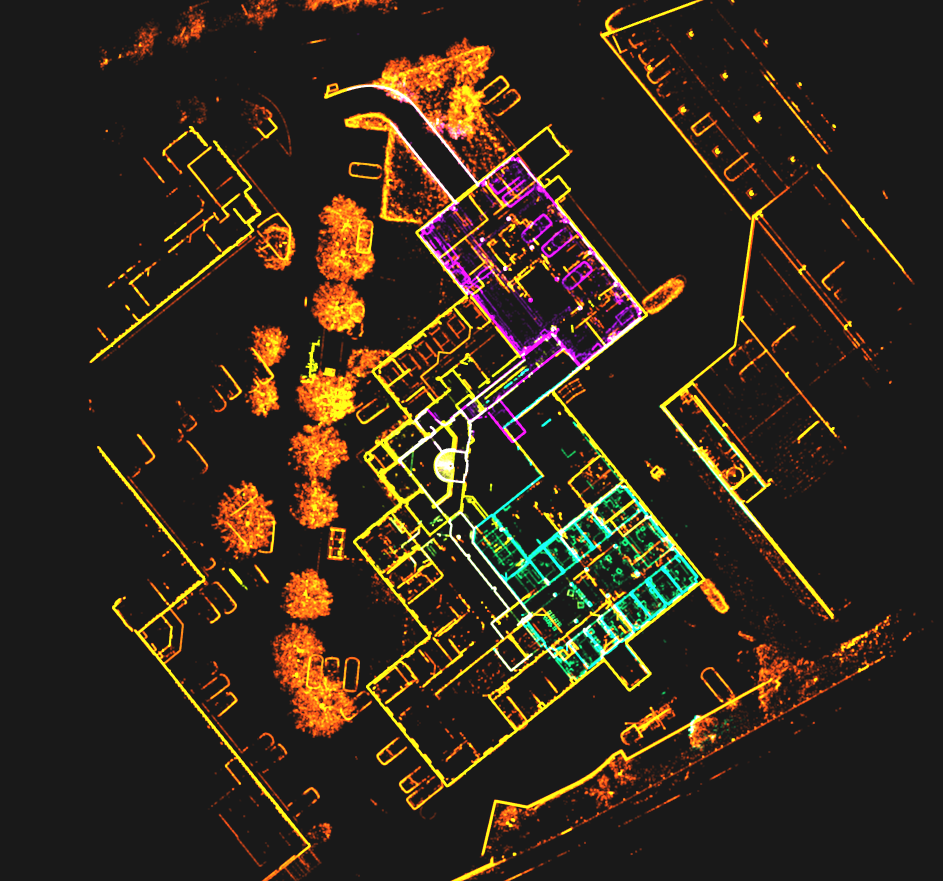
Nous pouvons maintenant parler de l'application de SLAM la plus importante pour nous : les systèmes de cartographie mobile. Vous pouvez considérer ces outils comme des scanners laser conçus pour offrir les meilleurs workflows possibles en matière de documentation de bâtiments.
Les systèmes de cartographie mobile utilisent une combinaison de capteurs hautement calibrés et de la technologie SLAM optimisée pour la cartographie. Ces outils vous permettent de capturer des nuages de points en 3D et des images panoramiques pendant que vous marchez. Ils offrent une documentation rapide et complète pour les biens importants et les environnements complexes tels que les usines, les sites de travail et les bureaux.
Vous pouvez également voir ces dispositifs désignés sous le nom de :
- Systèmes intérieurs de cartographie mobile (IMMS)
- Systèmes portables de cartographie mobile
- Scanners laser SLAM
Mais il s'agit essentiellement de la même chose.
Ces dispositifs ne doivent pas être confondus avec un autre type de système de cartographie mobile, qui se monte sur le toit d'un véhicule pour les grands projets de capture en extérieur.
.jpg?width=300&name=Screenshot%202020-09-08%20at%2009.57.24%20(1).jpg)
Que fait le SLAM dans la cartographie mobile?
Le SLAM est la "sauce secrète" qui permet au système de fonctionner sans trépied.
La technologie SLAM fusionne les données des capteurs à bord du système de cartographie mobile pour suivre votre position lorsque vous vous déplacez dans le bien. Vous pouvez considérer chaque position sur cette trajectoire comme un "trépied virtuel", que le logiciel utilise au cours de la phase de traitement pour s'assurer que chaque point du nuage de points se trouve au bon endroit.

Pourquoi s'en préoccuper ?
En permettant le développement de la technologie de la cartographie mobile, le SLAM nous a aidé à franchir l'étape logique suivante dans la construction de la technologie de la documentation.
Pendant longtemps, le travail de documentation des bâtiments a été effectué manuellement, à l'aide d'appareils tels que des théodolites ou des mètres à ruban. Les années 1980 ont vu l'apparition des premières stations totales, qui saisissent les points beaucoup plus rapidement et avec une très grande précision. Dans les années 2000, les scanners laser terrestres (TLS) sont apparus et ont porté le workflow de la documentation à un niveau supérieur en capturant des millions de points au lieu d'un seul à la fois.
En 2015, les premiers systèmes de cartographie mobile utilisant du SLAM sont apparus. Ils offrent une nouvelle avancée - ils peuvent capturer des millions de points pendant que l'opérateur se déplace, de sorte qu'ils ne sont plus confinés à un poste dédié comme le sont les TLS. En prime, ils intègrent des caméras RVB qui permettent de prendre des photos à 360° sans effort supplémentaire.
CAPTURE RAPIDE
Un workflow TLS peut nécessiter la configuration de votre scanner des dizaines de fois pour un seul projet (voire des centaines, si l'actif est particulièrement important). La cartographie mobile élimine cette étape, ce qui accélère considérablement le workflow. Dans des projets typiques, nous avons constaté une augmentation de la vitesse de 10 fois ou plus.
UN ENREGISTREMENT PLUS RAPIDE
Étant donné qu'un TLS ne capture qu'une petite zone à la fois, vous devrez relier les scans laser 3D pour produire un nuage de points final. Vous pouvez y parvenir en faisant chevaucher vos scans laser, ce qui vous ralentit car cela limite la distance à laquelle vous pouvez déplacer le TLS vers la station suivante. Vous pouvez également utiliser des cibles d'arpentage, ce qui est complexe et augmente le temps passé sur le site.
Un appareil mobile effectue un scan laser 3D continu - dans certains cas, il peut capturer jusqu'à 3 000 mètres carrés - avant qu'il ne soit nécessaire de lancer un autre scan laser. Cela signifie qu'il y a moins de travail pour assurer une couverture complète.
DONNÉES COMPLÈTES
Étant donné qu'un scanner laser ne peut capturer que ce qui se trouve dans sa ligne de mire, un TLS exige que vous déplaciez l'appareil vers une nouvelle configuration si vous souhaitez scanner au-delà d'un obstacle et éviter les zones vides dans vos données. Un appareil mobile vous permet de contourner un obstacle, d'effectuer votre capture et de poursuivre votre chemin.
DOCUMENTATION INTUITIVE ET PHOTORÉALISTE
Les meilleurs cartographes mobiles utilisent une combinaison de lidar et de caméras RVB pour capturer un ensemble de données 3D photoréalistes et densément colorées du bâtiment. La navigation, l'exploration et les mesures sont intuitives, même pour les parties prenantes qui ne sont pas du tout familiarisées avec les nuages de points.
RETOUR D'INFORMATION EN TEMPS RÉEL
Les principaux cartographes mobiles équipés d'une tablette vous montreront la qualité de votre capture au fur et à mesure que vous travaillez, vous offrant ainsi un retour d'information en temps réel sur votre numérisation. Vous avez raté un point ? L'écran vous l'indiquera, ce qui vous permettra d'effectuer immédiatement une correction.
Cartographie mobile vs. numérisation laser terrestre
Comparaison des différents workflows et de la manière dont ils répondent aux exigences de votre projet
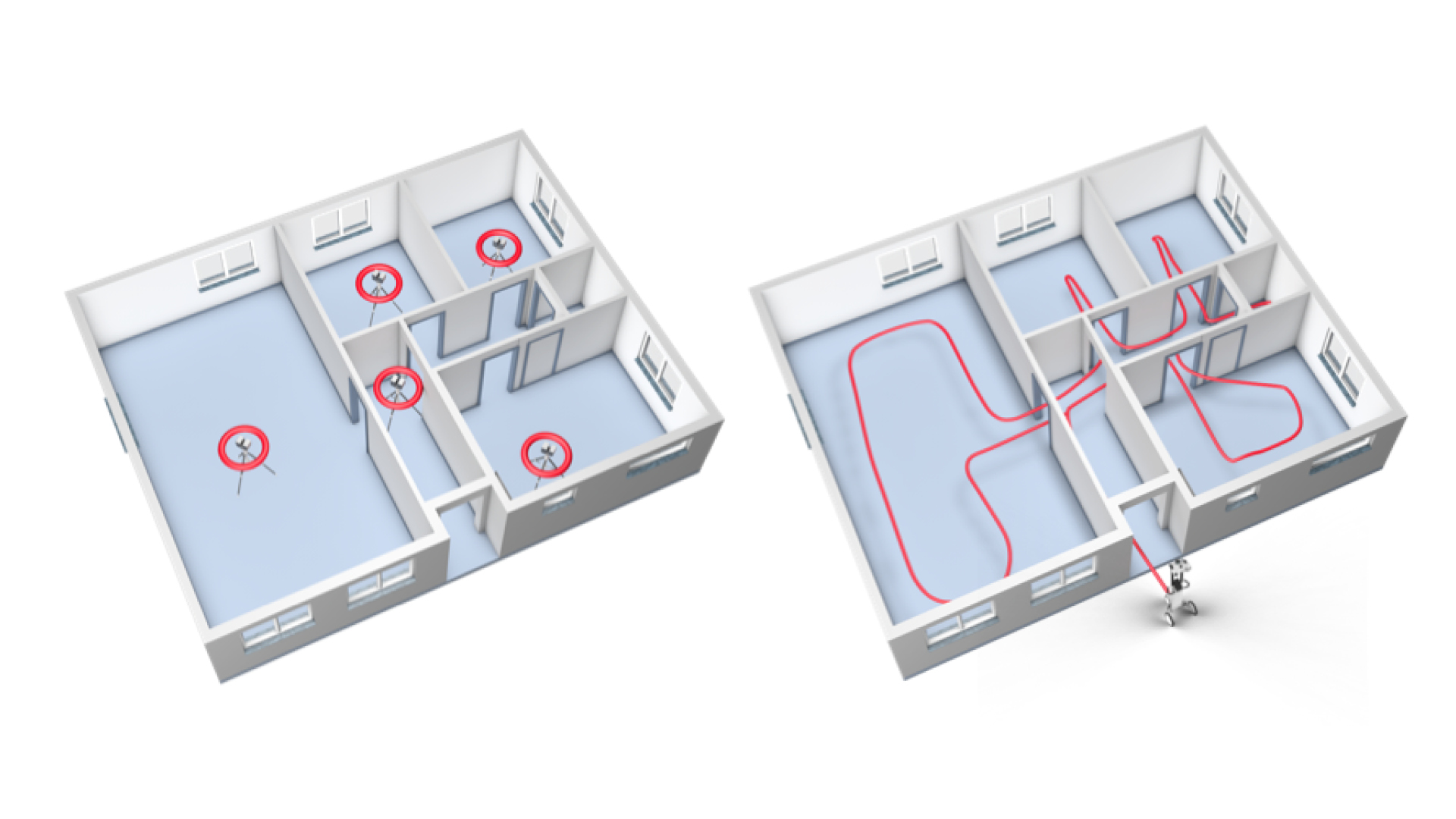
Pour illustrer les avantages des systèmes SLAM et de cartographie mobile, comparons leurs performances à celles d'un système TLS en documentant un environnement de bureau typique.
Vous trouverez ci-dessous une illustration des configurations nécessaires pour capturer cet espace complexe à l'aide d'un TLS et de l'enregistrement basé sur les cibles. Ajoutez des configurations supplémentaires dans chacun des cadres de porte pour l'enregistrement de cloud à cloud (à moins que vous ne souhaitiez consacrer du temps à la mise en place des cibles). Ajoutez des configurations supplémentaires si des meubles obstruent la vue de votre scanner, et encore plus de configurations si vous souhaitez capturer les détails fins d'éléments tels que les cadres de fenêtres.
Au plus vite, vous pourriez scanner cet espace en 20 minutes environ avec un TLS, mais compte tenu des facteurs supplémentaires que nous avons énumérés ci-dessus, vous pouvez voir que cela prendrait probablement plus que cela.
En utilisant un workflow de cartographie mobile, vous pouvez vous passer de trépieds et vous déplacer dans l'espace en fonction de vos besoins. Vous pouvez vous déplacer rapidement et être sûr d'avoir obtenu tout ce dont vous avez besoin.
Ce qu'il peut faire pour votre entreprise
En permettant les workflows flexibles dont nous avons parlé plus haut, les systèmes SLAM et de cartographie mobile peuvent avoir des effets à long terme sur votre entreprise. L'ajout d'un mappeur mobile à votre ensemble d'outils peut vous aider à conserver vos clients actuels et à en gagner de nouveaux, tout en contribuant à la croissance de votre entreprise.
AMÉLIORER L'EFFICACITÉ
Terminez des projets plus importants à moindre coût et prenez en charge davantage de projets avec votre main-d'œuvre existante.
RÉDUIRE LES PERTURBATIONS POUR LES CLIENTS
Entrez et sortez plus rapidement. Réduisez les temps d'arrêt nécessaires à votre numérisation et gagnez de nouveaux clients sur des sites sensibles tels que dans les secteurs de la santé, de l'industrie et d'autres.
ÉLARGISSEZ VOS SERVICES ET VOS OFFRES
Commencez à proposer des visites à 360° entièrement immersives générées par votre scanner mobile. Rendez votre liste de services plus attrayante que celle de vos concurrents.
ACCROÎTRE LA FLEXIBILITÉ
Répondre aux besoins des clients sensibles au prix en produisant des ensembles de données de haute qualité à faible coût.
AIGUISER L'AVANTAGE CONCURRENTIEL
En améliorant votre efficacité, votre flexibilité et vos services, et en réduisant les perturbations pour vos clients, vous permettrez à votre entreprise de se démarquer de ses concurrents.
Livre blanc gratuit
Découvrez la précision du NavVis VLX par rapport aux scanners statiques
Questions fréquemment posées
Maintenant que vous comprenez les bases des systèmes SLAM et de cartographie mobile, vous avez probablement des questions techniques approfondies. Nous répondons ci-dessous aux questions les plus courantes. Revenez dans le futur, car nous mettrons à jour cette section avec d'autres réponses.
Quels termes techniques dois-je connaître pour comprendre la cartographie mobile?
Nous avons élaboré un petit glossaire que vous pouvez consulter ici. Il explique tous les termes techniques en langage clair et simple.
Quelle est la précision d'un système de cartographie mobile ?
La réponse simple : Les meilleurs systèmes produisent de manière fiable des données qui conviennent parfaitement aux besoins de la documentation tel que construit. Lors d'une étude de cas, nous avons testé notre propre système, le NavVis VLX en effectuant un seul scan laser 3D dans un parking. Avec l'application de fermeture de boucle pour la correction des erreurs, l'équipe a validé les données avec une précision absolue de 8 mm, à un sigma près. Avec fermeture de boucle ET l'optimisation du point de contrôle, la précision absolue est passée à 6 mm.
Cela signifie que vous pouvez utiliser les données en toute confiance pour des projets tels que LOD 300 BIM ou des plans d'étage à une échelle allant jusqu'à 1:50.
La réponse plus exhaustive : La précision absolue d'un système de cartographie mobile est très difficile à définir par un seul chiffre. En effet, ils traitent le nuage de points final à l'aide de la technologie SLAM - et les performances de SLAM varient en fonction de nombreux facteurs réels, tels que la géométrie de l'environnement que vous scannez. (C'est la raison pour laquelle les fiches techniques mentionnent souvent des chiffres de précision absolue sous la forme d'une fourchette - par exemple, 6-15 mm).
Avant qu'un vendeur puisse faire des déclarations générales sur la précision d'un système de cartographie mobile, il devra effectuer des tests approfondis, dans une variété de scénarios, et voir comment le système fonctionne dans chacun des scénarios du monde réel où il serait utilisé.
Pourquoi certains systèmes SLAM sont-ils plus performants que d'autres ?
Si vous alignez trois systèmes avec des facteurs de forme et des charges utiles de capteurs identiques, vous pouvez toujours vous attendre à ce que les systèmes renvoient des résultats dont la qualité varie de manière significative. Comment cela se fait-il ?
Tout dépend de la qualité de la mise en œuvre du SLAM. Voici deux des principaux facteurs qui distinguent un système SLAM d'un autre.
ROBUSTESSE
Dans le monde réel, les systèmes SLAM trouveront certains environnements plus difficiles que d'autres. En voici un bon exemple : Un long couloir avec un minimum de portes n'offre pas les caractéristiques dont le système SLAM a besoin pour suivre votre position. Cela peut entraîner des erreurs dans les données de trajectoire générées par SLAM et dégrader la précision de la version finale du nuage de points.
Les logiciels SLAM plus robustes peuvent faire face à un plus grand nombre de situations de ce type et les gérer mieux. Ils produisent une meilleure trajectoire et, à leur tour, des nuages de points finaux plus précis.
CORRECTION DES ERREURS
L'environnement n'est pas la seule chose qui peut créer des erreurs dans un ensemble de données mobiles. Les erreurs proviennent également des capteurs eux-mêmes - tous les capteurs produisent une certaine quantité de bruit, qui peut s'ajouter à de minuscules écarts dans l'estimation SLAM. Au fil du temps, ces erreurs s'accumulent et créent un problème appelé dérive.
C'est pourquoi pratiquement tous les scanners du marché proposent des fonctions qui corrigent les erreurs et améliorent la précision des données finales.
Cependant, tous les systèmes SLAM ne sont pas égaux à cet égard. La plupart d'entre eux proposent la fermeture de boucle, qui corrige les erreurs lorsque vous revenez à un endroit que vous avez déjà scanné. Mais toutes les technologies de fermeture de boucle ne produisent pas les mêmes résultats. Certains systèmes offrent une fonctionnalité de point de contrôle pour verrouiller les données de trajectoire aux points de contrôle relevés, mais ce n'est pas le cas de la plupart d'entre eux.
En bref, certains systèmes SLAM ont été conçus pour gérer les complexités de la numérisation dans le monde réel mieux que d'autres. Cette différence apparaît clairement dans les résultats.

Pourquoi certains systèmes SLAM traitent-ils les données plus rapidement que d'autres ?
Il s'agit d'une question de calcul de la puissance.
Comme nous l'avons vu plus haut, un système de cartographie SLAM fusionne des données provenant de plusieurs capteurs pour produire une carte nuage de points. La liste comprend des unités IMU qui suivent l'orientation de l'appareil, des caméras HD qui prennent de grandes images colorisées et de multiples unités lidar qui enregistrent 300 000 points (ou plus) par seconde.
La difficulté réside dans le fait que la charge utile du capteur produit une énorme quantité de données, trop pour que l'ordinateur d'un appareil mobile puisse les traiter facilement.
Par conséquent, chaque fabricant doit choisir ses priorités en matière de traitement des données. Certains conçoivent leurs appareils pour générer des nuages de points en temps réel et font des compromis sur la qualité. D'autres choisissent de traiter les données plus lentement, mais produisent des résultats de meilleure qualité. Un autre groupe vous donne la possibilité de choisir entre un traitement en temps réel et un traitement de meilleure qualité, en fonction des besoins de votre projet.
NavVis a choisi une autre approche. Les cartographes de l'entreprise traitent les données pendant que vous scannez pour afficher un retour visuel en temps réel sur votre tablette. Ils utilisent ensuite des ordinateurs plus puissants pour finaliser les données et produire des nuages de points de la plus haute qualité.
Comment le système SLAM peut-il produire un nuage de points plus précis que celui pour lequel le capteur est spécifié ?
Parce qu'un scanner mobile capture en continu pendant que vous marchez.
Alors qu'un scanner terrestre capture chaque point de mesure une seule fois au cours d'un scan laser 3D, un système SLAM capture automatiquement chaque mesure plusieurs fois, sous plusieurs angles, au fur et à mesure que vous vous déplacez dans le bien.
Le logiciel post-traitement dispose ainsi d'un grand nombre de valeurs x, y et z possibles pour chaque point. Il effectue une analyse complexe de ces valeurs, ce qui lui permet de réduire, voire d'éliminer, l'incertitude liée à des phénomènes physiques tels que les capteurs bruit.
Le résultat ? Il peut produire un nuage de points plus précis que celui pour lequel le capteur est spécifié.
La technologie de cartographie mobile évolue rapidement. Comment puis-je être sûr que mon appareil ne sera pas obsolète dès que je l'aurai acheté ?
Un appareil SLAM est bien plus qu'un simple matériel : il repose en grande partie sur un logiciel pour produire un produit final appellé nuage de points. En mettant à jour et en améliorant ce logiciel, un fabricant peut faire évoluer votre appareil longtemps après votre achat initial.
Certains fournisseurs continuent de développer leur logiciel pour améliorer le traitement SLAM, la visualisation en direct et la qualité de leur site post-traitement. Ils publient ces améliorations sous forme de mises à jour logicielles, de sorte qu'il vous suffit de les télécharger et de les installer sur votre appareil ou sur votre ordinateur pour effectuer la mise à niveau. Voilà : Vous disposez désormais de la technologie la plus récente.

Pourquoi certains systèmes SLAM traitent-ils les données plus rapidement que d'autres ?
Il s'agit d'une question de calcul de la puissance.
Comme nous l'avons vu plus haut, un système de cartographie SLAM fusionne des données provenant de plusieurs capteurs pour produire une carte nuage de points. La liste comprend des unités IMU qui suivent l'orientation de l'appareil, des caméras HD qui prennent de grandes images colorisées et de multiples unités lidar qui enregistrent 300 000 points (ou plus) par seconde.
La difficulté réside dans le fait que la charge utile du capteur produit une énorme quantité de données, trop pour que l'ordinateur d'un appareil mobile puisse les traiter facilement.
Par conséquent, chaque fabricant doit choisir ses priorités en matière de traitement des données. Certains conçoivent leurs appareils pour générer des nuages de points en temps réel et font des compromis sur la qualité. D'autres choisissent de traiter les données plus lentement, mais produisent des résultats de meilleure qualité. Un autre groupe vous donne la possibilité de choisir entre un traitement en temps réel et un traitement de meilleure qualité, en fonction des besoins de votre projet.
NavVis a choisi une autre approche. Les cartographes de l'entreprise traitent les données pendant que vous scannez pour afficher un retour visuel en temps réel sur votre tablette. Ils utilisent ensuite des ordinateurs plus puissants pour finaliser les données et produire des nuages de points de la plus haute qualité.
Comment le système SLAM peut-il produire un nuage de points plus précis que celui pour lequel le capteur est spécifié ?
Parce qu'un scanner mobile capture en continu pendant que vous marchez.
Alors qu'un scanner terrestre capture chaque point de mesure une seule fois au cours d'un scan laser 3D, un système SLAM capture automatiquement chaque mesure plusieurs fois, sous plusieurs angles, au fur et à mesure que vous vous déplacez dans le bien.
Le logiciel post-traitement dispose ainsi d'un grand nombre de valeurs x, y et z possibles pour chaque point. Il effectue une analyse complexe de ces valeurs, ce qui lui permet de réduire, voire d'éliminer, l'incertitude liée à des phénomènes physiques tels que les capteurs bruit.
Le résultat ? Il peut produire un nuage de points plus précis que celui pour lequel le capteur est spécifié.
La technologie de cartographie mobile évolue rapidement. Comment puis-je être sûr que mon appareil ne sera pas obsolète dès que je l'aurai acheté ?
Un appareil SLAM est bien plus qu'un simple matériel : il repose en grande partie sur un logiciel pour produire un produit final appellé nuage de points. En mettant à jour et en améliorant ce logiciel, un fabricant peut faire évoluer votre appareil longtemps après votre achat initial.
Certains fournisseurs continuent de développer leur logiciel pour améliorer le traitement SLAM, la visualisation en direct et la qualité de leur site post-traitement. Ils publient ces améliorations sous forme de mises à jour logicielles, de sorte qu'il vous suffit de les télécharger et de les installer sur votre appareil ou sur votre ordinateur pour effectuer la mise à niveau. Voilà : Vous disposez désormais de la technologie la plus récente.

Essayez-le vous-même
Franchissez une nouvelle étape dans la révolution de la numérisation mobile
La vitesse et l'évolutivité des appareils de cartographie mobile n'ont jamais été aussi bonnes, apportant la précision de qualité topographique aux projets les plus difficiles. Mettez la main à la pâte avec le NavVis VLX ou le NavVis M6 et voyez par vous-même ce qui est possible.
