



NavVis 看到了机器人测绘的光明未来,积极探索概念验证模型,无论是独立还是与我们的合作伙伴合作。
在NavVis 的幕后,一些空间技术领域最聪明的人正全身心地投入到各自领域的最新发展中。我们有远见,但同时也是实用主义者,对最前沿的创新感到兴奋,同时也在考虑其最可行的应用。
基于我们多年的自主研发和与世界各地合作伙伴们共同合作,我们相信机器人扫描技术正在迅猛发展,逐渐接近关键的转折点。
当我们谈论机器人测绘时,我们指的是一种无需人工干预、能够自主运行的移动扫描 。波士顿动力公司(Boston Dynamics)等公司在这方面取得了长足进步,特别是他们的四足机器人 "Spot "以及在其背部安装激光扫描设备的选项。
这一概念的优点是扫描成本低,数据可靠,更新频率高,而且可以无限制地进入现场。例如,在远程设施的检查中,机器人可以代替人工进行例行安全检查。
目前,我们的计算显示,自主扫描的速度并不快,单次扫描的成本也不低。机器人的成本和维护、进行实际试验以及安装标记和路线培训等基础设施等因素,都是一个复杂的设置。
但真正的好处来自于重复。一个区域的测绘次数越多,每平方米的测绘成本就越低;同样,数据越新,价值就越高。因此,机器人扫描对于那些需要每天进行扫描以做出数据驱动决策的公司,或者那些对人类来说可能存在危险或安全问题的公司来说,具有极大的吸引力。
由 NavVis 技术驱动的机器人扫描
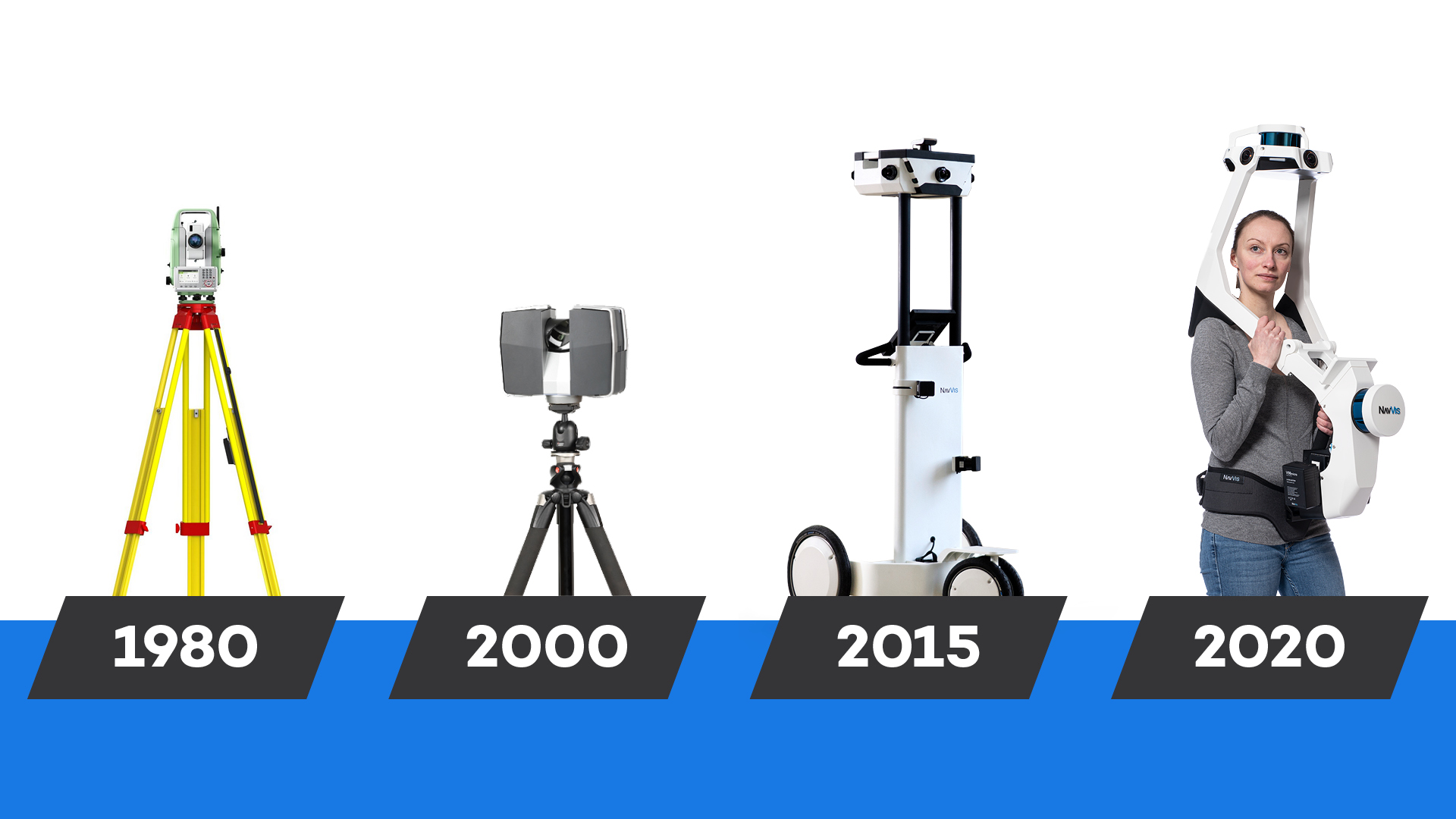
激动人心的时刻,不是吗?但这样的进步并非凭空而来。在现实捕捉 和空间智能 的范围内,机器人测绘是一直延伸到全站仪的一部分,而全站仪又让位于地面激光扫描仪(TLS),后者又导致了移动扫描 。
因此,机器人扫描和移动扫描之间的技术重叠程度高,而且互为裨益。
SLAM (同时定位和绘图)算法使NavVis M6 和 NavVis VLX移动扫描 系统的竞争优势,是机器人测绘的完美基础技术。
毕竟,我们的SLAM 基于推动自动驾驶汽车行业发展的相同理念。使用我们的技术,机器人测绘设备的操作员将永远不必担心所采集点云数据的质量,也不必担心其在下游应用中的通用性。
我们与客户和合作伙伴的合作是持续不断的,而且富有成效。如果还有人希望开始使用机器人测绘,我们的建议是投资NavVis 基于SLAM 的测绘系统,与 TLS 相比,它已经大大降低了扫描成本。
要实现自主扫描的下一步?我们很乐意与您进一步探讨您的具体应用案例,以及我们如何帮助您实现这一目标。
