
Industry-leading wearable and handheld laser scanning systems
Our cutting-edge mapping technology enables you to capture detailed, survey-grade data in a variety of environments, both indoors and outdoors.
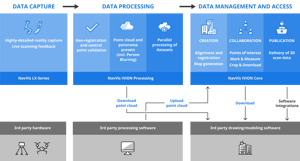



NavVis seamlessly fits into existing workflows with third party solutions
Innovative workflow from NavVis to PointFuse to Autodesk Revit
IBKS tested their innovative scan-to-BIM workflow in a huge, complex healthcare facility, a project of over 450,000 sqft. Learn more about their success in combining NavVis technology with PointFuse and Autodesk Revit.


"We have found that we can save a lot of time when modeling from point clouds to BIM models using NavVis IVION. We estimate at least 10% time saving during this process."

Simply fill out the form below, and one of our colleagues will be in touch shortly.
Talk to us to discover customized solutions, unique applications, and significant ROI opportunities.
Our experts will clarify pricing details and assist you in optimizing your toolkit and services.
And if you would like a demo, don't hesitate to request one!
“With NavVis VLX, we can race through different floor plates, building sizes, complexities. We’ve had a lot of success with it. We now have four NavVis VLX in operation, every day, 5 hours a day, producing around one to one and a half million sqft of as-built capture per week."
- Adam Fingret, CEO, Extreme Measures Inc.