

NavVis sieht eine glänzende Zukunft für die robotergestützte Kartierung und erforscht aktiv Proof-of-Concept-Modelle sowohl unabhängig als auch in Zusammenarbeit mit unseren Partnern.
Hinter den Kulissen von NavVisbeschäftigen sich einige der klügsten Köpfe im Bereich der räumlichen Technologien mit den neuesten Entwicklungen auf ihrem Gebiet. Wir sind Visionäre, aber auch Pragmatiker, die von den neuesten Innovationen begeistert sind, aber auch deren praktikable Anwendungen in Betracht ziehen.
"Auf Grundlage unserer langjährigen Forschungs- und Entwicklungsarbeit - sowohl unabhängig als auch in Zusammenarbeit mit Partnern auf der ganzen Welt - sind wir der Meinung, dass robotorgestütztes Mapping eine äußerst vielversprechende Technologie ist."
Wenn wir von robotischer Kartierung sprechen, meinen wir eine Art mobiles Mapping , die autonom und ohne menschliches Eingreifen arbeiten kann. Unternehmen wie Boston Dynamics haben große Fortschritte in diese Richtung gemacht, insbesondere mit ihrem vierbeinigen Roboter "Spot" und der Möglichkeit, ein Laserscanning-Gerät auf seinem Rücken zu befestigen.
Das Versprechen dieses Konzepts besteht darin, dass es niedrige Scan-Kosten und zuverlässige Daten, die in hoher Frequenz aktualisiert werden, zusammen mit einem unbegrenzten Zugang zum Standort bietet. Ein Beispiel für die Anwendung dieses Konzepts wäre die Inspektion abgelegener Anlagen, bei der Roboter die Arbeit von Menschen übernehmen, um routinemäßige Sicherheitskontrollen durchzuführen.
Zum jetzigen Zeitpunkt zeigen unsere Berechnungen, dass autonomes Scannen weder schneller noch billiger pro Einzelscan ist. Faktoren wie die Kosten und die Wartung des Roboters, die Durchführung von praktischen Versuchen und die Installation von Infrastruktur wie Markierungen und Routentraining machen den Aufbau komplex.
Der eigentliche Vorteil ergibt sich jedoch aus der Wiederholung. Je öfter ein Gebiet kartiert wird, desto billiger wird die Kartierung pro Quadratmeter; und je aktueller die Daten sind, desto wertvoller sind sie auch. Unter diesen Gesichtspunkten ist das robotergestützte Scannen für Unternehmen, die täglich Scans benötigen, um datengestützte Entscheidungen zu treffen, oder in Bereichen, in denen für Menschen eine Gefahr oder ein Sicherheitsproblem bestehen könnte, äußerst attraktiv.
Powered by NavVis: SLAM-basiertes Scannen mit Robotern
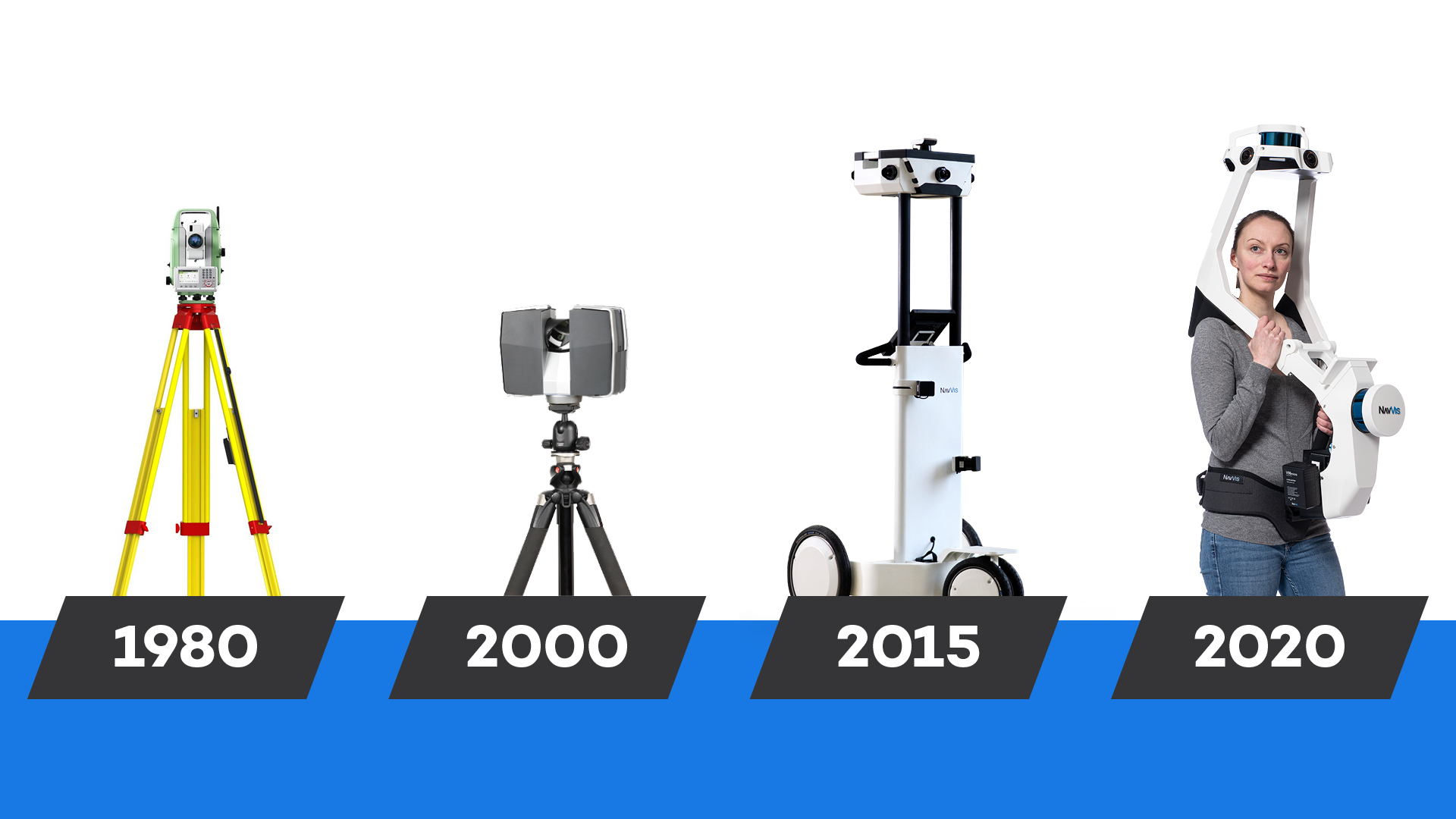
Aufregende Zeiten, was? Aber dieser Fortschritt findet nicht in einem Vakuum statt. Im Zusammenhang mit Reality Capture und räumliche Intelligenz ist die robotergestützte Kartierung Teil einer Linie, die bis zu den Totalstationen zurückreicht, die dann den Weg für terrestrische Laserscanner (TLS) ebneten, die wiederum zu mobiles Mapping führten.
Die technologischen Überschneidungen zwischen der robotergestützten Kartierung und mobiles Mapping sind nicht nur umfangreich, sondern auch von gegenseitigem Nutzen.
Die AlgorithmenSLAM (Simultane Lokalisierung und Kartierung), die den NavVis M6 und NavVis VLX mobiles Mapping Systemen einen Wettbewerbsvorteil verschaffen, sind die perfekte Basistechnologie für die robotergestützte Kartierung.
Unser SLAM basiert auf denselben Ideen, die auch die autonome Autoindustrie antreiben. Mit unserer Technologie müssen sich die Betreiber eines robotischen Kartierungsgeräts weder um die Qualität der erfassten Punktwolkendaten noch um ihre Vielseitigkeit für nachgelagerte Anwendungen sorgen.
Die Zusammenarbeit mit unseren Kunden und Partnern ist kontinuierlich und äußerst produktiv. Falls noch jemand den Weg der robotergestützten Kartierung einschlagen möchte, raten wir zu einer Investition in ein SLAM-basiertes Kartierungssystem von NavViszu investieren, das die Kosten für das Scannen im Vergleich zu einem TLS bereits drastisch senkt.
Und für den nächsten Schritt beim autonomen Scannen? Wir würden uns freuen, mit Ihnen über Ihren spezifischen Anwendungsfall zu sprechen und darüber, wie wir Ihnen helfen können, ihn zu verwirklichen.
