

Today’s mobile scanning systems are fast, scalable, and capable of high quality point clouds accurate enough for the most demanding projects.
EDITOR'S NOTE: The information below is taken from a recent NavVis webinar about achieving high accuracy with mobile scanners. For more information on the topics below, check out the on-demand webinar recording here.
It’s common knowledge that mobile scanners can speed up your capture workflow and grow your business. What you might not know is that today’s best systems can also produce extremely accurate point clouds accurate enough for the most demanding documentation projects.
We’ll show you how. Here’s a quick overview to show how you can achieve accuracy of 6 mm (or better) with a mobile scanner.
Mobile scanning best practices
Since these devices capture point clouds as you move, they are prone to small errors that can degrade the quality of your point cloud. Luckily, today’s mobile scanners offer features that you can use to correct these errors and ensure the highest possible accuracy.
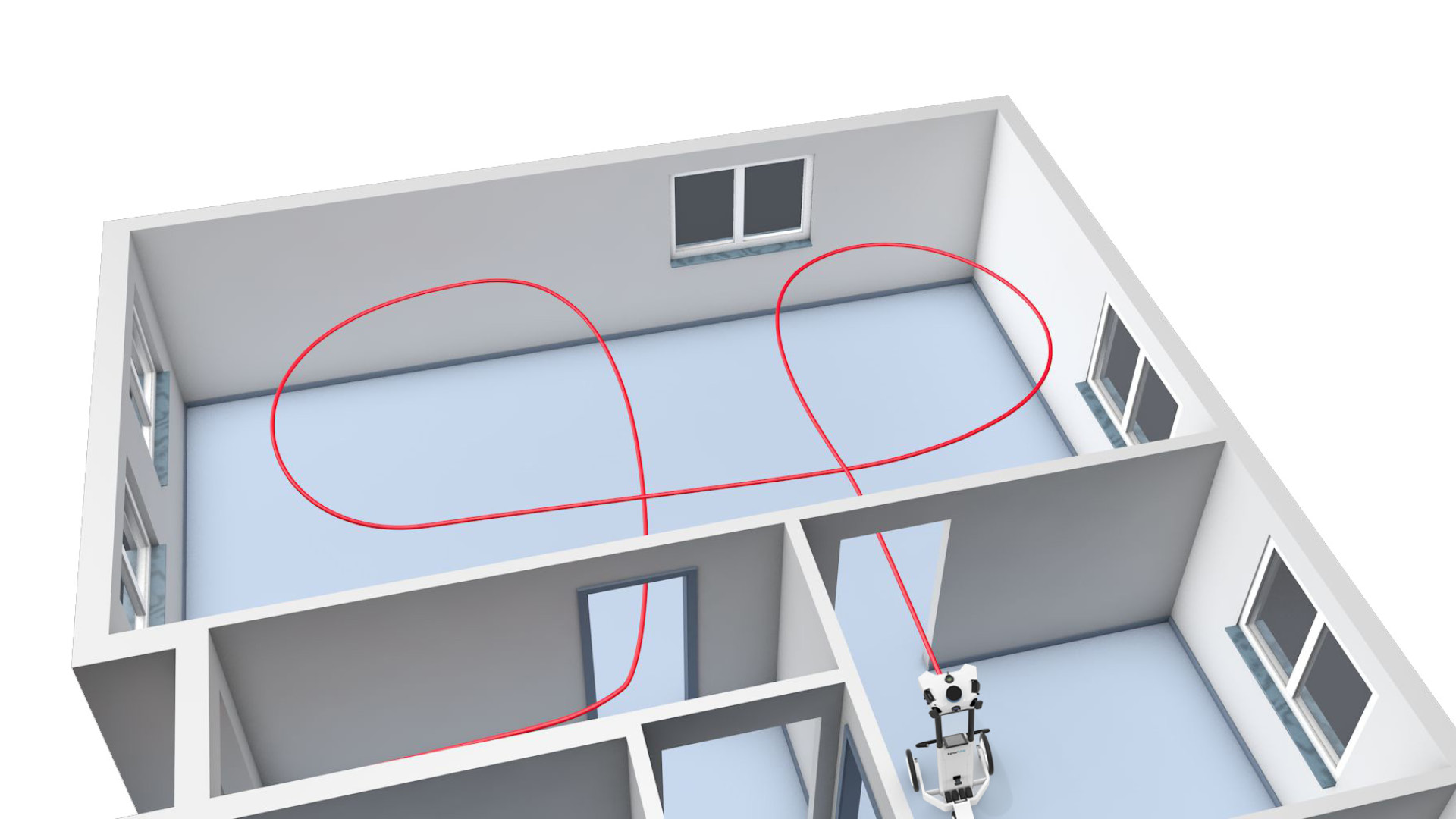
Loop closure
This feature is standard on virtually all systems, and it is often all you need for smaller scans.
To use loop closure, return to a spot that have you already scanned. The SLAM (simultaneous localization and mapping) algorithm will recognize this location and automatically optimize the point cloud to correct errors and improve accuracy.
Control point optimization
Only a few of the more advanced mobile scanners on the market offer this feature.
Control point optimization is optional for many scans, since you can achieve high accuracy in smaller projects with good loop closure. It becomes essential when you scan larger assets, because it corrects for the drift error that longer scans tend to cause in your point cloud.
Vendors implement this functionality in different ways. To use control point optimization with a NavVis scanner, add survey targets across your asset and capture their coordinates using a total station. As you scan, capture the control points using the scanner. When you post-process the data, enter the surveyed coordinates for each control point, and the software will use that information to optimize your point cloud and improve its accuracy.
Proof from the field
Now let’s demonstrate the accuracy gains you can expect from loop closure and control point optimization. To do this, we’ll look at two field tests that NavVis performed with its NavVis VLX wearable mobile scanner.
Small scan with loop closure
For the first test, a NavVis team scanned a section of an ordinary office building.
They selected the environment because it featured a combination of rooms and corridors that they know would challenge a mobile scanner. (In other words, it was likely to produce errors that needed correction.) Since the scan was small, the team used loop closure — but no control points — to optimize the point cloud and eliminate errors.
- Area: 460 sq meters
- Time to scan: 30 minutes
- Control points: 0
For ground truth, NavVis commissioned a full total-station survey of the office. The team measured distances on the survey manually and compared them against the same distances in the mobile point cloud.
The results? The loop closure proved effective at correcting for errors in this small scan.
- 22 of 24 local measurements were within 5 mm of the surveyed ground truth
- The remaining 2 local measurements were within 6 and 10 mm
Large scan with control points
For the next test, the NavVis team scanned a parking garage.
Since the asset was quite large, they knew the final point cloud was very likely to exhibit drift. To correct for this error, they used a combination of loop closure and control point optimization.
- Area: 1500 sq meters (large)
- Time to scan: 20 minutes
- Control points: 8
The team optimized the data in two ways: once using loop closure only, and once using loop closure and control points. At the end, they compared both data sets against a terrestrial scan commissioned from a local service provider.
The results? Control point optimization proved very effective at reducing drift.
- Loop closure: 8 mm absolute accuracy
- Loop closure and control point optimization: 6 mm absolute accuracy
Wrapping up
Looking at the data above, it should be clear that loop closure and control point optimization can help you produce very accurate point clouds.
Not convinced yet? This post is just a quick overview of the testing that NavVis performed to verify the effectiveness of error correction and benchmark the accuracy of its mobile scanners in a variety of challenging environments. For more information on the testing - and a deep dive into the hard numbers - check out an on-demand recording of the webinar here.